
RoboMatch: A Unified Mobile-Manipulation Teleoperation Platform with Auto-Matching Network Architecture for Long-Horizon Tasks
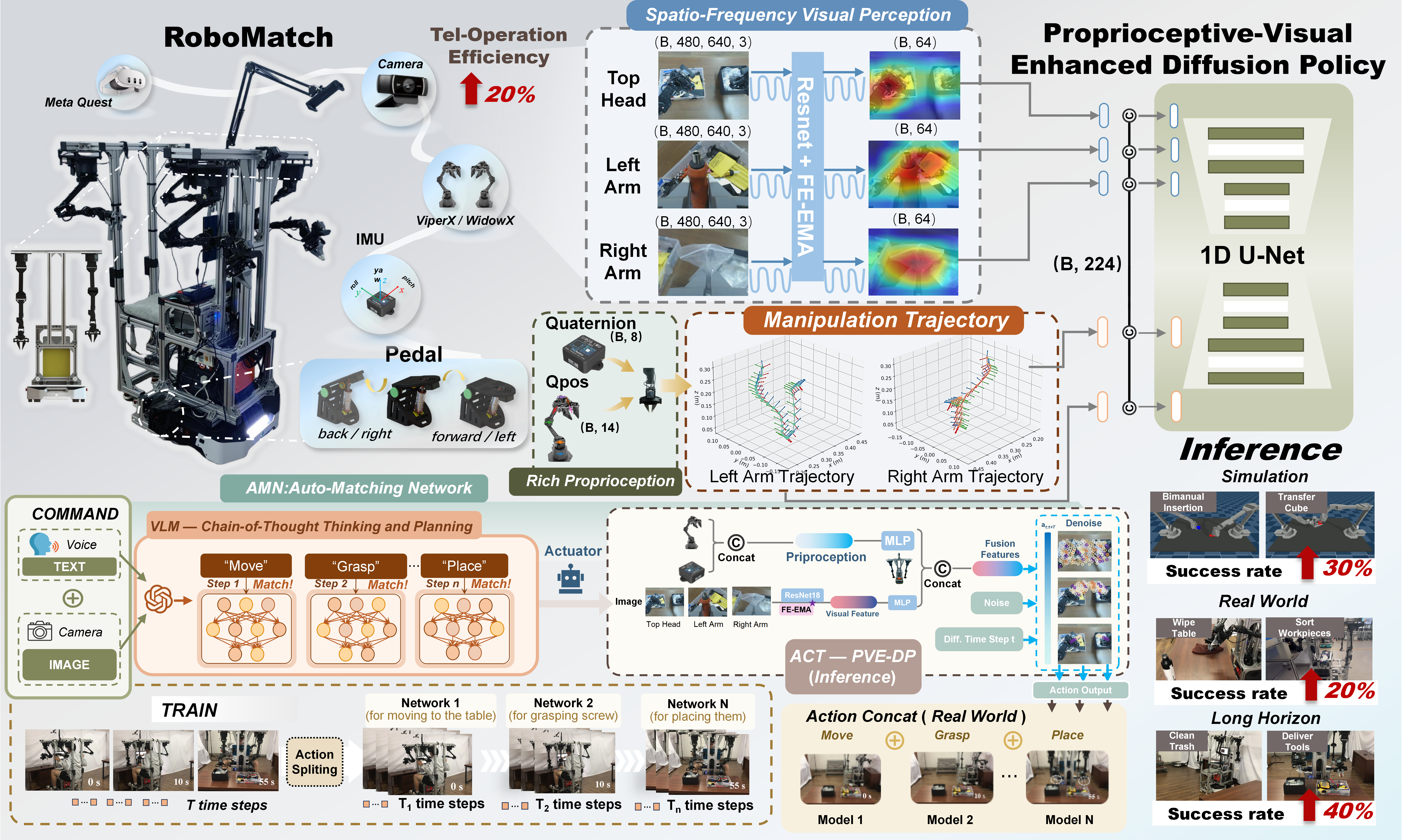
Overall Framework of RoboMatch.
Abstract
This paper presents RoboMatch, a novel unified teleoperation platform for mobile manipulation with an automatching network architecture, designed to tackle long-horizon tasks in dynamic environments. Our system enhances teleoperation performance, data collection efficiency, task accuracy, and operational stability. The core of RoboMatch is a cockpit style control interface that enables synchronous operation of the mobile base and dual arms, significantly improving control precision and data collection. Moreover, we introduce the Proprioceptive-Visual Enhanced Diffusion Policy (PVE-DP), which leverages Discrete Wavelet Transform (DWT) for multi scale visual feature extraction and integrates high-precision IMUs at the end-effector to enrich proprioceptive feedback, substantially boosting fine manipulation performance. Furthermore, we propose an Auto-Matching Network (AMN) architecture that decomposes long-horizon tasks into logical sequences and dynamically assigns lightweight pre-trained models for distributed inference. Experimental results demonstrate that our approach improves data collection efficiency by over 20%, increases task success rates by 20–30% with PVE-DP, and enhances long-horizon inference performance by approximately 40% with AMN, offering a robust solution for complex manipulation tasks.
Video
BibTeX
@misc{liu2026robomatch,
title={RoboMatch: A Unified Mobile-Manipulation Teleoperation Platform with Auto-Matching Network Architecture for Long-Horizon Tasks},
author={Hanyu Liu and Yunsheng Ma and Jiaxin Huang and Keqiang Ren and Jiayi Wen and Yilin Zheng and Haoru Luan and Baishu Wan and Pan Li and Jiejun Hou and Zhihua Wang and Zhigong Song},
year={2026},
eprint={2509.08522},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2509.08522},
}